Содержание
Большая роботность в Я.Метрике? Как реагировать ⋆ Блог Смирнова
В последние месяцы тема роботности и вопросов по ней выросла в десятки раз по обсуждениям. Как оказалось у многих вебмастеров метрика роботности не может поддаваться какому либо анализу, поскольку данный параметр из за дня в день демонстрирует фантастические показатели. Особенно это коснулось многих после большого апдейта алгоритма системы с 22 июня 2022.
Особенно при работе с ПФ сайта данный показатель имеет наивысший приоритет у многих, так как, якобы, определяется качество кампании накрутки.
Здесь подробно разберем данную тему и выясним что на что реально влияет и как это показатель мерить. А именно ответим на следующие фундаментальный вопросы по роботности:
- Высокая роботность Метрике это плохо для позиций? Есть ли корреляция между позициями и высокой роботностью?
- Если имеется высокая роботность (или в роботы записаны в ботоводные визиты), значит Яндекс “знает”, что сайт накручивается ПФ-ми? Ждем бана?
- Как/чем анализировать качество визитов?
Антифрод Яндекса: 3 системы
Чтобы раз и навсегда разобраться с этими вопросами, нужно понимать, как устроена система анифрода на разных площадках/сервисов Яндекса. Система не одна, их целых 3!
Система не одна, их целых 3!
- Антифрод Поиска
- Андифрод Метрики
- Антифрод Директа
Запоминаем:
Это фундаментально разные системы, они не пересекаются в своей работе. Как показывает практика они не связаны между собой и существуют изолировано!
Антифрод Яндекса
Как показано на схеме выше, все 3 системы имеют разные походы к фильтрации трафика.
Это три нейронных сети, которые непрерывно получают и агрегируют огромное количество данных, а затем определяют кто робот, кто нет, кто скликал рекламу, кто нет. По мере обучения сетки происходят апдейты и в системах аналитики начинают меняться данные.
На сегодняшний день эти 3 системы не объеденные в одну большую нейросеть. Каждая сетка собирает данные в своем пространстве и в дальнейшем агрегирует информацию, делают выводы.
У каждой системы индивидуальный тип трафика. Соответственно, задачи, которые они решают пока не могут анализироваться совместно.
Какой тип трафика/данных обрабатывают системы антифорода:
- Яндекс Метрика – все что связанно с внутренними пф (поведение на сайте)
- Яндекс Поиск – все что связанно с внешними пф (поведение в SERP)
- Яндекс Директ – здесь понятно, только ad-трафик
Что не так с Яндекс Метрикой
Прежде, давайте найдем определение этого инструмента, данного самим Яшей. Метрика – это МАРКЕТИНГОВЫЙ инструмент, который помогает получать наглядные отчеты, записи действий посетителей, отслеживать источники трафика.
Т.е. к Антифроду Поиска никакого отношения пока не имеет.
Антифрод Метрики работает исключительно с обработкой внутреннего поведения пользователей. И на основе этих данных помечает визиты, как роботы и реальных пользователей.
Да, конечно, это не говорит от том, что Метрика не может распознавать накрутку. Но к результатам это отношение не имеет.
22 июля 2022
Официальных заявлений от Яндекса на данный момент нет, но 22 июня 2022 года был или большой апдейт или большой сбой.
В роботы теперь могут попадать:
- все, кто заходит с инкогнито
- пользователи, оставившие реальные заявки и даже оплаченные заказы;
- пользователи из других поисковых систем, в частности – Google;
- пользователи с нетипичным поведением – кликают на политику конфиденциальности и прочие документы;
- пользователи с устаревших или непопулярных браузеров;
- пользователи, которые заходят с ПК через мобильный интернет.
Становиться очевидно, что Метрика только учиться распознавать какие либо манипуляции с накруткой, но на сегодня это реализовано очень плохо. Многие живые визиты попадают в роботы с разных источников. Но то, что Яндекс намерен решить эту проблему – это точно. Когда это будет работать корректно неизвестно. Внимательно следим.
Как можно анализировать качество пф трафика?
Резюмируем все сказано выше тем, что анализировать и делать выводы только по Я.Метрике ошибочно. Многие вебмастера видя картину завышенных данных роботности в срочном порядке останавливают свои кампании накрутки. И тем самым “обнуляют” все будущие достижения по позициям или поддержки позиций. А это куча потерянного времени и денег. Конечно, после данных манипуляций и ультраосторожностей сам процесс работы с ПФ становиться нерентабельным.
И тем самым “обнуляют” все будущие достижения по позициям или поддержки позиций. А это куча потерянного времени и денег. Конечно, после данных манипуляций и ультраосторожностей сам процесс работы с ПФ становиться нерентабельным.
Какой инструмент связан с Антифородм Поиска? – Я.Вебмастер
Именно он собирает для анализа данные по SERP Яндекса. Там вполне можно прочекать и сегметировать по времени все запросы, которые вы накручивайте.
Постоянно тестируйте ультраНЧ запросы, которые очень редко задают пользователи. Таким образом можно фиксировать, что только такие запросы (в какой то день) были сделаны исключительно шаблоном.
Анализ прост. Если запрос присутствует в отчете Вебмастера, то профиль прошел антифрод поиска.
Какие выводы
Тезисно:
- Метрика умеет (не всех) выявляет ботов, но накрутка ПФ работает как и раньше;
- Метрика местами искажает данные;
- Много реальных людей идентифицируются как роботы в результате чего мы видим искаженную аналитику.

- в Яндекс.Вебмастере количество кликов не совпадает с данными из Метрики;
- Чекайте ботоводный трафик в Вебмастере

Фильтрация посещений роботов в Яндекс.Метрике и Google Analytics
#Системы аналитики
#Яндекс Метрика
#128
Июль’19
13
Июль’19
13
Искусственный трафик, вызванный обращениями к сайту роботами и «пауками», может сильно искажать данные о трафике. Для получения более точной информации следует исключить их из статистических данных. В системах аналитики существуют встроенные функции, позволяющие осуществить фильтрацию роботов, о которых мы и расскажем.
Фильтрация посещений роботов в Яндекс.Метрике
Для того чтобы отфильтровать визиты роботов в Метрике, необходимо в настройках счетчика перейти на вкладку «Фильтры» и указать необходимый способ.
Вы увидите следующее окно:
Обратив внимание на параметр «Фильтрация роботов» вы заметите, что возможно три варианта:
- Учитывать визиты всех роботов. Данная настройка отключает фильтрацию визитов роботов.
- Фильтровать роботов только по строгим правилам. В данном случае фильтрация осуществляется на основании шаблонов IP-адресов и User-Agent . Среди преимуществ — отсутствие ложных срабатываний, однако по таким правилам фильтруется лишь небольшая доля искусственного трафика.
- Фильтровать роботов по строгим правилам и по поведению — позволяет более точно определить робота, но не исключены и ложные срабатывания, что может немного исказить картину естественного трафика.
Отфильтровать роботов в представляемых данных можно с помощью характеристики «Роботность» в инструментах сегментации:
Кроме того, в Метрике также возможно посмотреть отчёт о том, когда роботы посещали сайт. Для этого необходимо перейти в «Отчеты»- «Стандартные отчеты» — «Мониторинг» — «Роботы».
Для этого необходимо перейти в «Отчеты»- «Стандартные отчеты» — «Мониторинг» — «Роботы».
Фильтрация посещений роботов в Google Analytics
Чтобы включить фильтрацию, перейдите во вкладку «Администратор» — «Настройки представления».
Поставив флажок «Исключить обращения роботов и „пауков“», вы исключите весь искусственный трафик и он не будет учитываться при составлении отчётов и представлении данных.
Похожее
Системы аналитики
Яндекс Метрика
Визиты, просмотры и посетители в Метрике
Системы аналитики
Яндекс Метрика
Атрибуция: последний значимый переход
Системы аналитики
Яндекс Метрика
#114
Визиты, просмотры и посетители в Метрике
Апрель’19
3236
12
Системы аналитики
Яндекс Метрика
#112
Атрибуция: последний значимый переход
Апрель’19
9019
11
Системы аналитики
Яндекс Метрика
#45
Почему не работает вебвизор в Яндекс. Метрике
Метрике
Ноябрь’17
16823
6
Системы аналитики
Яндекс Метрика
#31
Как настроить цели в Яндекс.Метрике
Ноябрь’17
3547
5
Системы аналитики
Яндекс Метрика
#27
Как установить счетчик Яндекс.Метрики
Ноябрь’17
4075
6
Публикации – METRICS
Guillaume Avrin, Virginie Barbosa, Agnes Delaborde
хорошо, и Agile Production), полагаясь как на физические испытательные центры (кампания по полевой оценке), так и на виртуальные испытательные центры (кампания по оценке на основе данных), чтобы мобилизовать, помимо европейского сообщества робототехники, сообщество искусственного интеллекта. В этой статье представлен этот подход и проложен путь к новой парадигме конкуренции робототехники и искусственного интеллекта.
В этой статье представлен этот подход и проложен путь к новой парадигме конкуренции робототехники и искусственного интеллекта.
Риккардо Бертольо, Джулио Фонтана, Маттео Маттеуччи, Давиде Факкинетти и Стефано Санторо
Целью ACRE (Конкурс по оценке роботов для сельскохозяйственных продуктов) является предоставление набора эталонных показателей для сельскохозяйственных роботов и интеллектуальных орудий. Задействуя возможности общего применения, ACRE уделяет особое внимание прополке, определенной как одна из задач, где робототехнике легче продемонстрировать свой потенциал. ACRE, как и три других конкурса роботов, организуемых европейским проектом METRICS, построен на устоявшейся идее бенчмаркинга посредством соревнований. В этой статье мы представляем структуру ACRE и примеры ее контрольных показателей.
Раньери К. М., Маклеод С., Драгоне М., Варгас П. А. и Ромеро Р. А. Ф.
Мировые демографические прогнозы указывают на постепенное старение населения. Этот факт стимулировал исследования в области Ambient Assisted Living, которые включают разработки в области умных домов и социальных роботов. Чтобы наделить такие среды действительно автономным поведением, алгоритмы должны извлекать семантически значимую информацию из любых доступных сенсорных данных. Распознавание человеческой деятельности является одной из самых активных областей исследований в этом контексте. Предлагаемые подходы различаются в зависимости от модальности ввода и рассматриваемой среды.
Этот факт стимулировал исследования в области Ambient Assisted Living, которые включают разработки в области умных домов и социальных роботов. Чтобы наделить такие среды действительно автономным поведением, алгоритмы должны извлекать семантически значимую информацию из любых доступных сенсорных данных. Распознавание человеческой деятельности является одной из самых активных областей исследований в этом контексте. Предлагаемые подходы различаются в зависимости от модальности ввода и рассматриваемой среды.
Скачать (pdf)
Саад Ахмад, Кулуну Самаравикрама, Эса Рахту и Роэл Питерс
Опубликовано в: 20th International Conference on Advanced Robotics
Последние разработки в области робототехники и глубокого обучения позволяют обучать модели для самых разных задач из больших объемов собранных данных. Визуальные и роботизированные задачи, такие как оценка позы или хватание, обучаются на данных изображений (RGB-D) или облаках точек, которые должны быть репрезентативными для реальных объектов, чтобы получить точные и надежные результаты. Это подразумевает либо обобщенные объектные модели, либо большие наборы данных, включающие все изменчивости объектов и среды, для обучения. Однако сбор данных часто является узким местом в быстрой разработке моделей, основанных на обучении. На самом деле сбор данных может быть невозможен или даже нежелателен, поскольку физические объекты недоступны или физическая запись данных требует слишком много времени и денег. Например, при создании системы записи данных с камерами и роботизированным оборудованием. Инструменты САПР в сочетании с моделированием роботов предлагают решение для создания обучающих данных, которые можно легко автоматизировать и которые могут быть столь же реалистичными, как и данные реального мира. В этой работе мы предлагаем конвейер генерации данных, который принимает в качестве входных данных CAD-модель объекта и автоматически генерирует необходимые обучающие данные для оценки положения объекта и обнаружения захвата объекта. Сгенерированные данные об объекте: RGB и изображение глубины, бинарная маска объекта, метка класса и истинное положение земли в кадре камеры и мира.
Это подразумевает либо обобщенные объектные модели, либо большие наборы данных, включающие все изменчивости объектов и среды, для обучения. Однако сбор данных часто является узким местом в быстрой разработке моделей, основанных на обучении. На самом деле сбор данных может быть невозможен или даже нежелателен, поскольку физические объекты недоступны или физическая запись данных требует слишком много времени и денег. Например, при создании системы записи данных с камерами и роботизированным оборудованием. Инструменты САПР в сочетании с моделированием роботов предлагают решение для создания обучающих данных, которые можно легко автоматизировать и которые могут быть столь же реалистичными, как и данные реального мира. В этой работе мы предлагаем конвейер генерации данных, который принимает в качестве входных данных CAD-модель объекта и автоматически генерирует необходимые обучающие данные для оценки положения объекта и обнаружения захвата объекта. Сгенерированные данные об объекте: RGB и изображение глубины, бинарная маска объекта, метка класса и истинное положение земли в кадре камеры и мира. Мы демонстрируем создание набора данных из нескольких наборов сборок промышленных объектов и оцениваем обученные модели с использованием современных подходов к оценке позы и обнаружению захвата. Код и видео доступны по адресу: https://github.com/KulunuOS/gazebo_dataset_generation
Мы демонстрируем создание набора данных из нескольких наборов сборок промышленных объектов и оцениваем обученные модели с использованием современных подходов к оценке позы и обнаружению захвата. Код и видео доступны по адресу: https://github.com/KulunuOS/gazebo_dataset_generation
Тодука С., Хохгешвендер Н.
Опубликовано в: Цифровое моделирование человека и приложения в области здравоохранения, безопасности, эргономики и управления рисками. ИИ, продукт и услуга. HCII 2021
Домашние сервисные роботы становятся все более распространенными и могут выполнять различные вспомогательные задачи, такие как извлечение предметов или помощь в приеме лекарств для поддержки людей с нарушениями различной степени тяжести. Однако разработка роботов, заботящихся о людях, должна быть не только сосредоточена на развитии расширенных функций, но и должна сопровождаться определением протоколы сравнительного анализа , позволяющие проводить строгую и воспроизводимую оценку роботов и их функций. В связи с этим особое значение имеет оценка способности роботов справляться со сбоями и неожиданными событиями, возникающими при их взаимодействии с людьми в реальных сценариях. Например, человек может уронить предмет во время передачи робота-человека из-за его веса. Однако систематическое расследование опасных ситуаций остается сложной задачей, поскольку (i) отказы трудно воспроизвести; и (ii) могут повлиять на здоровье людей. Поэтому в этой статье мы предлагаем использовать концепцию научных соревнований роботов в качестве протокола сравнительного анализа для оценки роботов-помощников и собирать наборы данных о взаимодействиях человека и робота, охватывающих широкий спектр сбоев, которые присутствуют в реальных домашних условиях. Мы демонстрируем процесс определения процедуры бенчмаркинга с функциями передачи от человека к роботу и от робота к человеку, а также выполняем тестовый прогон бенчмарков, вызывая несколько режимов отказа, таких как падение объектов, игнорирование робота и освобождение объектов.
В связи с этим особое значение имеет оценка способности роботов справляться со сбоями и неожиданными событиями, возникающими при их взаимодействии с людьми в реальных сценариях. Например, человек может уронить предмет во время передачи робота-человека из-за его веса. Однако систематическое расследование опасных ситуаций остается сложной задачей, поскольку (i) отказы трудно воспроизвести; и (ii) могут повлиять на здоровье людей. Поэтому в этой статье мы предлагаем использовать концепцию научных соревнований роботов в качестве протокола сравнительного анализа для оценки роботов-помощников и собирать наборы данных о взаимодействиях человека и робота, охватывающих широкий спектр сбоев, которые присутствуют в реальных домашних условиях. Мы демонстрируем процесс определения процедуры бенчмаркинга с функциями передачи от человека к роботу и от робота к человеку, а также выполняем тестовый прогон бенчмарков, вызывая несколько режимов отказа, таких как падение объектов, игнорирование робота и освобождение объектов. Набор данных, включающий цветные изображения и изображения глубины, датчик силы и крутящего момента запястья и другие внутренние датчики робота, был собран во время пробного прогона. Кроме того, мы обсуждаем взаимосвязь между протоколами сравнительного анализа и стандартами, которые существуют или должны быть расширены в отношении процедур тестирования, необходимых для проверки и подтверждения соответствия стандартам.
Набор данных, включающий цветные изображения и изображения глубины, датчик силы и крутящего момента запястья и другие внутренние датчики робота, был собран во время пробного прогона. Кроме того, мы обсуждаем взаимосвязь между протоколами сравнительного анализа и стандартами, которые существуют или должны быть расширены в отношении процедур тестирования, необходимых для проверки и подтверждения соответствия стандартам.
От ERL к RAMI: расширение соревнований по морской робототехнике за счет виртуальных мероприятий , стр. 1-8.
Риккардо Бертольо, Джулио Фонтана, Маттео Маттеуччи, Давиде Факкинетти, Мишель Бердукат, Даниэль Боффети
Опубликовано в: 2021 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC)
Агропродовольственный конкурс по оценке роботов (ACRE) — это новый конкурс автономных роботов и интеллектуальных орудий. Он ориентирован на сельскохозяйственные задачи, такие как удаление сорняков или картографирование/обследование культур вплоть до разрешения одного растения. Такие способности имеют решающее значение для перехода к так называемому «Сельскому хозяйству 4.0», то есть точному земледелию, поддерживаемому ИКТ, искусственным интеллектом и робототехникой. ACRE — это соревнование по бенчмаркингу, т. е. действия, которые должны выполнять участники, структурированы как бенчмарки производительности. Контрольные показатели основаны на ключевых научных концепциях объективной оценки, повторяемости и воспроизводимости. Перенос таких концепций в сельскохозяйственный контекст, где большая часть тестовой среды полностью не контролируется, является одной из задач, решаемых ACRE. В конкурсе ACRE участвуют как физические полевые кампании, так и каскадные кампании на основе данных. В этом документе мы представляем контрольные показатели, разработанные для обоих типов кампаний, и сообщаем о результатах пробных запусков ACRE, которые проводились в 2020 году.
Такие способности имеют решающее значение для перехода к так называемому «Сельскому хозяйству 4.0», то есть точному земледелию, поддерживаемому ИКТ, искусственным интеллектом и робототехникой. ACRE — это соревнование по бенчмаркингу, т. е. действия, которые должны выполнять участники, структурированы как бенчмарки производительности. Контрольные показатели основаны на ключевых научных концепциях объективной оценки, повторяемости и воспроизводимости. Перенос таких концепций в сельскохозяйственный контекст, где большая часть тестовой среды полностью не контролируется, является одной из задач, решаемых ACRE. В конкурсе ACRE участвуют как физические полевые кампании, так и каскадные кампании на основе данных. В этом документе мы представляем контрольные показатели, разработанные для обоих типов кампаний, и сообщаем о результатах пробных запусков ACRE, которые проводились в 2020 году.
Опубликовано
Реми Ренье, Гийом Аврен, Виржини Барбоза, Даниэль Боффети, Энн Калугин, Софи Ларди-Фонтан 1, стр. 11-32.
11-32.
«Валидация методологий оценки автономных решений для прополки в рамках проектов Challenge ROSE и METRICS»
ROSE Challenge — это первое глобальное соревнование по робототехнике и искусственному интеллекту, в котором проводится независимая оценка выполнение роботизированной внутрирядной борьбы с сорняками в реальных и воспроизводимых условиях, чтобы обеспечить достоверную и объективную оценку их эффективности. В этом документе сообщается о разработке и проверке испытательных установок для этого конкурса, который представляет особую сложность: оценки проводятся в реальных условиях на посевных площадях и целевых живых организмах (культурах и сорняках). Кроме того, экспериментальные условия должны быть воспроизводимыми, чтобы можно было сравнивать результаты оценки и справедливо относиться к различным участникам. В статье также обсуждается возможность, которую предлагает эта задача, для согласованного определения средств и методов характеристики этих интеллектуальных систем. Инструменты, разработанные в рамках этой задачи, устанавливают необходимые ориентиры для будущих исследований в области сельскохозяйственной робототехники: аннотированные изображения будут особенно полезны для сообщества, а протокол оценки позволит определить согласованные методологии, выходящие за рамки задачи ROSE. После представления целей задачи в статье будут представлены методология и инструменты, разработанные и используемые для обеспечения объективной и сопоставимой оценки производительности разработанных систем и решений. Наконец, статья проиллюстрирует этот потенциал для гармонизации и обмена ссылками через европейский конкурс ACRE европейского проекта h3020 METRICS.
Инструменты, разработанные в рамках этой задачи, устанавливают необходимые ориентиры для будущих исследований в области сельскохозяйственной робототехники: аннотированные изображения будут особенно полезны для сообщества, а протокол оценки позволит определить согласованные методологии, выходящие за рамки задачи ROSE. После представления целей задачи в статье будут представлены методология и инструменты, разработанные и используемые для обеспечения объективной и сопоставимой оценки производительности разработанных систем и решений. Наконец, статья проиллюстрирует этот потенциал для гармонизации и обмена ссылками через европейский конкурс ACRE европейского проекта h3020 METRICS.
Сантош Тодука и Дибул Наир, Нико Хохгешвендер и Пол Г. Плёгер
Семинар: Семинар RO-MAN по ответственной робототехнике: роботы для общества и для общества (RESP-R), 29 августа 2022 г.
9
Обучаемые компоненты в роботах должны быть оценены с точки зрения нефункциональных требований (NFR), таких как надежность, отказоустойчивость и адаптивность, чтобы облегчить принятие ответственных роботов в среду, ориентированную на человека. Хотя на NFR влияет множество факторов, в этой статье мы сосредоточимся на наборах данных, которые используются для обучения моделей обучения, применяемых в роботах. Мы описываем желаемые характеристики для наборов данных робототехники и определяем связанные с ними НФР, на которые они влияют. Характеристики описываются в отношении изменчивости экземпляров в наборе данных, данных вне распространения, пространственно-временном воплощении роботов, сбоях взаимодействия и обучении на протяжении всей жизни. Мы подчеркиваем необходимость включения в наборы данных данных о нераспространении и отказах как для повышения производительности моделей обучения, так и для обеспечения возможности оценки роботов в непредвиденных ситуациях. Мы также подчеркиваем важность постоянного обновления наборов данных на протяжении всего срока службы робота и сопутствующей документации наборов данных для повышения прозрачности и отслеживаемости.
Хотя на NFR влияет множество факторов, в этой статье мы сосредоточимся на наборах данных, которые используются для обучения моделей обучения, применяемых в роботах. Мы описываем желаемые характеристики для наборов данных робототехники и определяем связанные с ними НФР, на которые они влияют. Характеристики описываются в отношении изменчивости экземпляров в наборе данных, данных вне распространения, пространственно-временном воплощении роботов, сбоях взаимодействия и обучении на протяжении всей жизни. Мы подчеркиваем необходимость включения в наборы данных данных о нераспространении и отказах как для повышения производительности моделей обучения, так и для обеспечения возможности оценки роботов в непредвиденных ситуациях. Мы также подчеркиваем важность постоянного обновления наборов данных на протяжении всего срока службы робота и сопутствующей документации наборов данных для повышения прозрачности и отслеживаемости.
Guillaume Avrin
Опубликовано в: AI and the Future of Skills, Volume 1: Capabilities and Assessments , OECD Publishing, Paris (2021)
По мере того, как искусственный интеллект (ИИ) становится более зрелым все чаще используется в мире труда наряду с людьми. Это поднимает вопрос о реальной ценности ИИ, его ограничениях и взаимодополняемости с навыками биологического интеллекта. На основе оценок систем ИИ, проведенных Национальной лабораторией метрологии и исследований во Франции, в этой главе предлагается высокоуровневая классификация возможностей ИИ и ее обобщение на другие задачи ИИ для проведения параллели с возможностями человека. В нем также представлены проверенные методы оценки систем ИИ, которые могут послужить основой для разработки методологии сравнения ИИ и человеческого интеллекта. Наконец, он рекомендует дальнейшие действия для прогресса в выявлении сильных и слабых сторон ИИ по сравнению с человеческим интеллектом. С этой целью в нем рассматриваются функции и механизмы, лежащие в основе возможностей, с учетом особенностей невыпуклого поведения ИИ при определении инструментов оценки.
Это поднимает вопрос о реальной ценности ИИ, его ограничениях и взаимодополняемости с навыками биологического интеллекта. На основе оценок систем ИИ, проведенных Национальной лабораторией метрологии и исследований во Франции, в этой главе предлагается высокоуровневая классификация возможностей ИИ и ее обобщение на другие задачи ИИ для проведения параллели с возможностями человека. В нем также представлены проверенные методы оценки систем ИИ, которые могут послужить основой для разработки методологии сравнения ИИ и человеческого интеллекта. Наконец, он рекомендует дальнейшие действия для прогресса в выявлении сильных и слабых сторон ИИ по сравнению с человеческим интеллектом. С этой целью в нем рассматриваются функции и механизмы, лежащие в основе возможностей, с учетом особенностей невыпуклого поведения ИИ при определении инструментов оценки.
Fiorini, L., Cornacchia Loizzo, F.G., Sorrentino, A., Rovini, E., Di Nuovo, A., & Cavallo, F.
Опубликовано в: Scientific Data, 9(1), 1-14.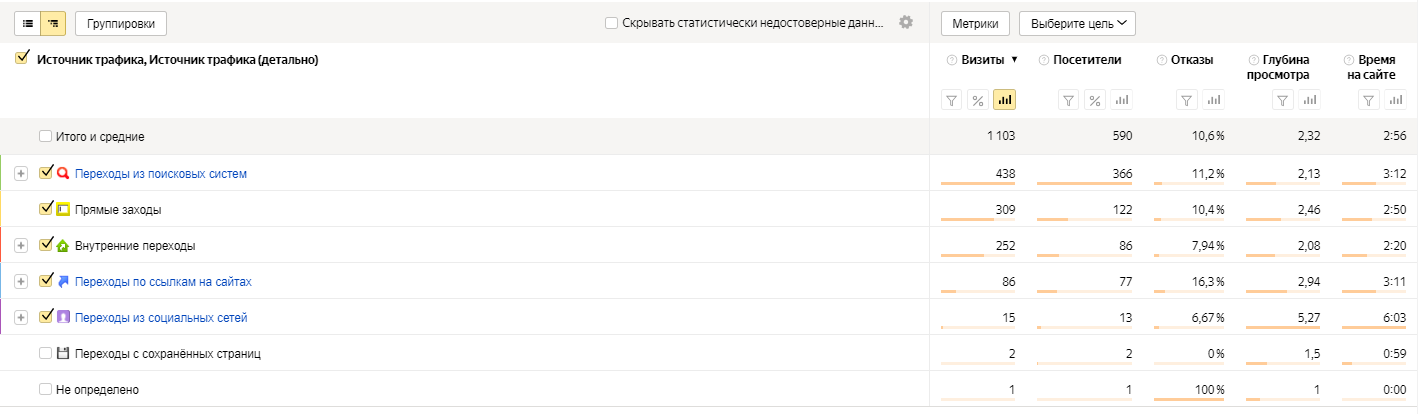 (2022)
(2022)
Этот документ делает общедоступной базу данных VISTA, состоящую из инерциальных и визуальных данных, для распознавания жестов и действий. Инерционные данные были получены с помощью SensHand, который может фиксировать движение запястья, большого, указательного и среднего пальцев, а визуальные данные RGB-D были получены одновременно с двух разных точек зрения, спереди и сбоку. База данных VISTA была получена в два экспериментальных этапа: на первом участникам было предложено выполнить 10 различных действий; в последнем они должны были разыграть пять сцен повседневной жизни, что соответствовало сочетанию действий выбранных действий. На обоих этапах Пеппер взаимодействовала с участниками. Точки зрения двух камер имитируют разные точки зрения перца. В целом набор данных включает 7682 экземпляра действий для этапа обучения и 3361 экземпляр действия для этапа тестирования. Его можно рассматривать как основу для будущих исследований методов искусственного интеллекта для распознавания активности, включая только инерциальные данные, только визуальные данные или подход слияния датчиков.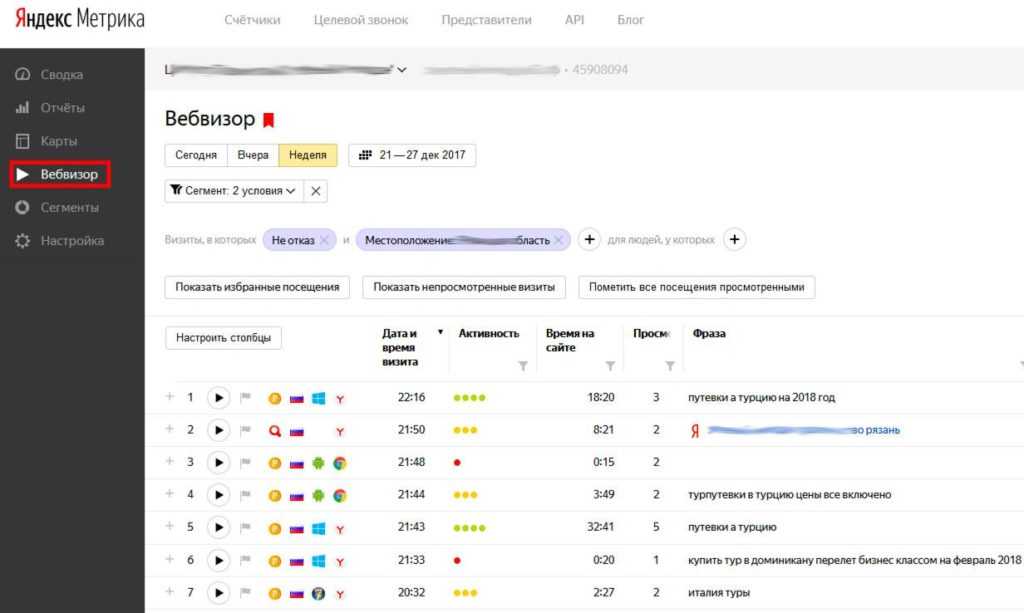
Скачать
Smith, R., Ding, Y., Goussetis, G., Dragone, M.
In: Novais, P., Vercelli, G., Larriba-Pey, J.L., Herrera, F., Chamoso, П. (ред.) Ambient Intelligence — программное обеспечение и приложения . ISAMI 2020. Достижения в области интеллектуальных систем и вычислений, том 1239. Springer, Cham. (2021)
Сложность и навязчивость текущих предложений по мониторингу AAL негативно влияют на приемлемость для конечных пользователей и, в конечном счете, по-прежнему препятствуют широкому внедрению ключевыми заинтересованными сторонами (например, поставщиками медицинских услуг из государственного и частного секторов), которые стремятся сбалансировать полезность системы с предварительной установкой и долгосрочные затраты на настройку и техническое обслуживание. Мы представляем результаты наших экспериментов с беспроводным зондированием без устройств (DFWS) с использованием готового коммерческого (COTS) оборудования для сверхвысокочастотной (UHF) радиочастотной идентификации (RFID). Наша система основана на антеннах над потолком и плотном размещении пассивных RFID-меток под полом. Мы обеспечиваем базовую производительность современных методов машинного обучения, применяемых к задаче локализации на уровне региона. Мы описываем набор данных, который мы собрали на реалистичном тестовом стенде, и которым мы делимся с сообществом. В отличие от прошлой работы с аналогичными системами, наш набор данных был собран в реальных домашних условиях в течение нескольких дней. Данные подчеркивают потенциал, но также и проблемы, которые необходимо решить, прежде чем подходы RFID DFWS можно будет использовать для долгосрочного мониторинга AAL.
Наша система основана на антеннах над потолком и плотном размещении пассивных RFID-меток под полом. Мы обеспечиваем базовую производительность современных методов машинного обучения, применяемых к задаче локализации на уровне региона. Мы описываем набор данных, который мы собрали на реалистичном тестовом стенде, и которым мы делимся с сообществом. В отличие от прошлой работы с аналогичными системами, наш набор данных был собран в реальных домашних условиях в течение нескольких дней. Данные подчеркивают потенциал, но также и проблемы, которые необходимо решить, прежде чем подходы RFID DFWS можно будет использовать для долгосрочного мониторинга AAL.
Риккардо Бертольо, Алессио Маццучелли, Нико Каталано, Маттео Маттеуччи
Смарт-технологии в сельском хозяйстве, том 4, 2023 г. опрыскивание или механическое уничтожение сорняков. Целенаправленное уничтожение сорняков снижает использование гербицидов и, таким образом, снижает воздействие обработок на окружающую среду. Сверточные нейронные сети — один из самых успешных методов автоматического обнаружения сорняков на изображениях RGB. Такие модели требуют большого количества размеченных данных для получения удовлетворительной производительности обнаружения. Сельскохозяйственный контекст представляет собой высокую степень изменчивости, и поэтому невозможно ожидать репрезентативного набора данных для каждого конкретного состояния, которое может возникнуть на полях. Методы адаптации предметной области используются для поддержания высокой эффективности обнаружения в различных полевых условиях, что снижает потребность в размеченных данных. В этом исследовании представлено сравнение двух основных методов переноса стилей для выполнения адаптации предметной области, а именно преобразования Фурье и архитектуры CycleGAN. Мы использовали эти методы, чтобы уменьшить разрыв между доменами в двух случаях использования: один с изображениями, собранными разными роботами с разными камерами, и другой с изображениями, собранными одной и той же платформой в разные годы.
Сверточные нейронные сети — один из самых успешных методов автоматического обнаружения сорняков на изображениях RGB. Такие модели требуют большого количества размеченных данных для получения удовлетворительной производительности обнаружения. Сельскохозяйственный контекст представляет собой высокую степень изменчивости, и поэтому невозможно ожидать репрезентативного набора данных для каждого конкретного состояния, которое может возникнуть на полях. Методы адаптации предметной области используются для поддержания высокой эффективности обнаружения в различных полевых условиях, что снижает потребность в размеченных данных. В этом исследовании представлено сравнение двух основных методов переноса стилей для выполнения адаптации предметной области, а именно преобразования Фурье и архитектуры CycleGAN. Мы использовали эти методы, чтобы уменьшить разрыв между доменами в двух случаях использования: один с изображениями, собранными разными роботами с разными камерами, и другой с изображениями, собранными одной и той же платформой в разные годы. Мы показываем, как в первом случае архитектура CycleGAN достигает удовлетворительной производительности и превосходит более простое преобразование Фурье. Вместо этого во втором случае все протестированные методы DA с трудом достигают базовой производительности. Мы также показываем, как введение потерь, основанных на расхождении фаз в архитектуре CycleGAN, стабилизирует обучение и повышает производительность. Кроме того, мы выпускаем новый набор данных помеченных сельскохозяйственных изображений и код наших экспериментов для воспроизводимости результатов и сравнения с будущими работами.
Мы показываем, как в первом случае архитектура CycleGAN достигает удовлетворительной производительности и превосходит более простое преобразование Фурье. Вместо этого во втором случае все протестированные методы DA с трудом достигают базовой производительности. Мы также показываем, как введение потерь, основанных на расхождении фаз в архитектуре CycleGAN, стабилизирует обучение и повышает производительность. Кроме того, мы выпускаем новый набор данных помеченных сельскохозяйственных изображений и код наших экспериментов для воспроизводимости результатов и сравнения с будущими работами.
Скачать
ключевых показателей, помогающих оценить производительность робота и повысить рентабельность инвестиций
РАЗМЕЩЕН 08.11.2022
В сегодняшней конкурентной среде использование роботов не гарантирует успешной автоматизации. Следовательно, использование показателей RPA может помочь организациям определить уровень производительности развертывания роботов.
Эти ключевые показатели позволят нам получить общее представление об успешности автоматизации процессов и оценить преимущества RPA.
Здесь мы предоставим вам некоторые ключевые показатели, помогающие оценить производительность робота и повысить рентабельность инвестиций.
1. Скорость
Автоматизация роботизированных процессов или RPA полностью зависит от скорости выполнения. Сегодня все больше и больше предприятий используют роботов-манипуляторов в производственной среде, поскольку традиционная ручная работа не может повысить производительность. Скорость работы нескольких наборов приложений зависит от человеческого фактора, поскольку большинство производственных процессов монотонны и повторяются. Утомительная работа не способствует повышению производительности труда и даже может стать причиной травм.
Поэтому, чтобы понять, насколько эффективна работа робота, нужно сравнить скорость традиционной ручной работы и автоматизированных процессов, но в долгосрочной перспективе. Руки роботов никогда не устают; им не нужно делать перерыв и обедать. Следовательно, рабочая скорость довольно высока по сравнению с ручными промышленными процессами.
Руки роботов никогда не устают; им не нужно делать перерыв и обедать. Следовательно, рабочая скорость довольно высока по сравнению с ручными промышленными процессами.
Например, манипуляторам DOBOT серии CR требуется 1 минута, чтобы подобрать и разместить семь коробок, обеспечивая высокую скорость укладки на поддоны. В то же время этот процесс не подходит для рабочих, так как является обременительным, повторяющимся и утомительным занятием.
2. Точность
Одной из основных целей автоматизации является устранение ошибок, неизбежно возникающих при ручной работе. Вот почему организации могут измерять успех RPA по уровню точности, которую могут обеспечить коллаборативные роботы.
Точность определяет качество продукции и снижает количество исправлений. Количество раз, которое необходимо обслуживать кобота, определяет качество RPA. Материал и вес продукта влияют на точность процесса. Причина может заключаться в выборе манипулятора с неподходящей полезной нагрузкой.
3. Безопасность рабочей силы
Предприятия, внедряющие автоматизацию процессов и роботов для совместной работы, обеспокоены безопасностью рабочей силы. Безопасность труда — еще один ключевой показатель, отражающий уровень эффективности работы RPA.
Роботы-манипуляторы могут снизить уровень травматизма среди рабочих, облегчить их нагрузку и снизить трудозатраты.
4. Программное обеспечение
Развертывание специального программного обеспечения обеспечивает высокий уровень эффективности. Установленное программное обеспечение с базовыми навыками программирования указывает на простой операционный фон. В то же время простота использования программного обеспечения подчеркивает экономию времени в производственной среде мультипликации.
Коботы Dobot развернуты в разнообразных приложениях в различных отраслях, обеспечивая высокую производительность с базовыми навыками программирования, необходимыми для управления манипулятором робота.